Ventura County Regional Semifinalists, Impact Award
Arizona East Regional Semifinalists
FIRST Championship Johnson Division
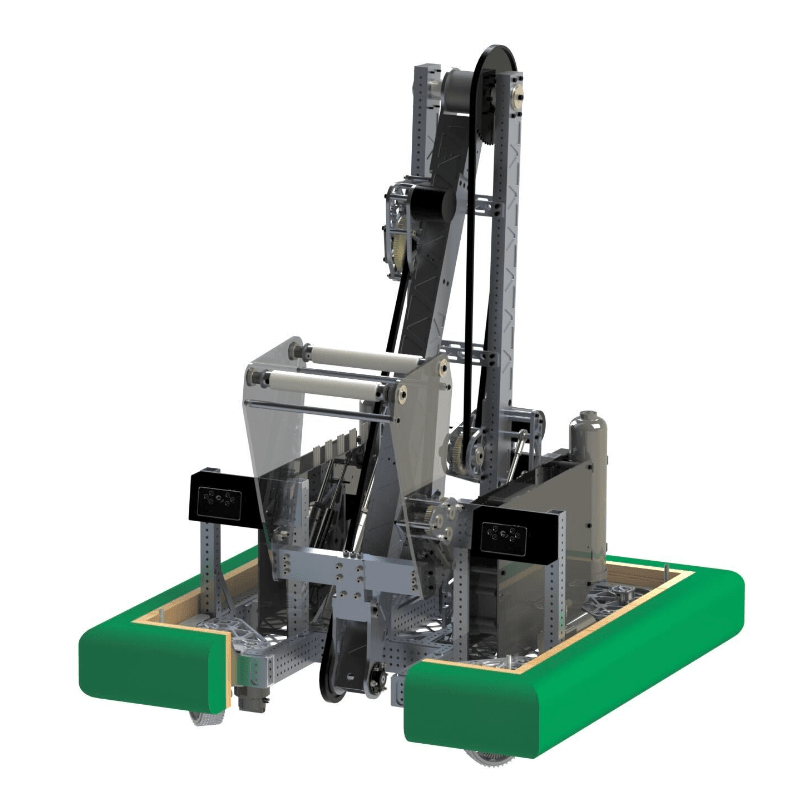
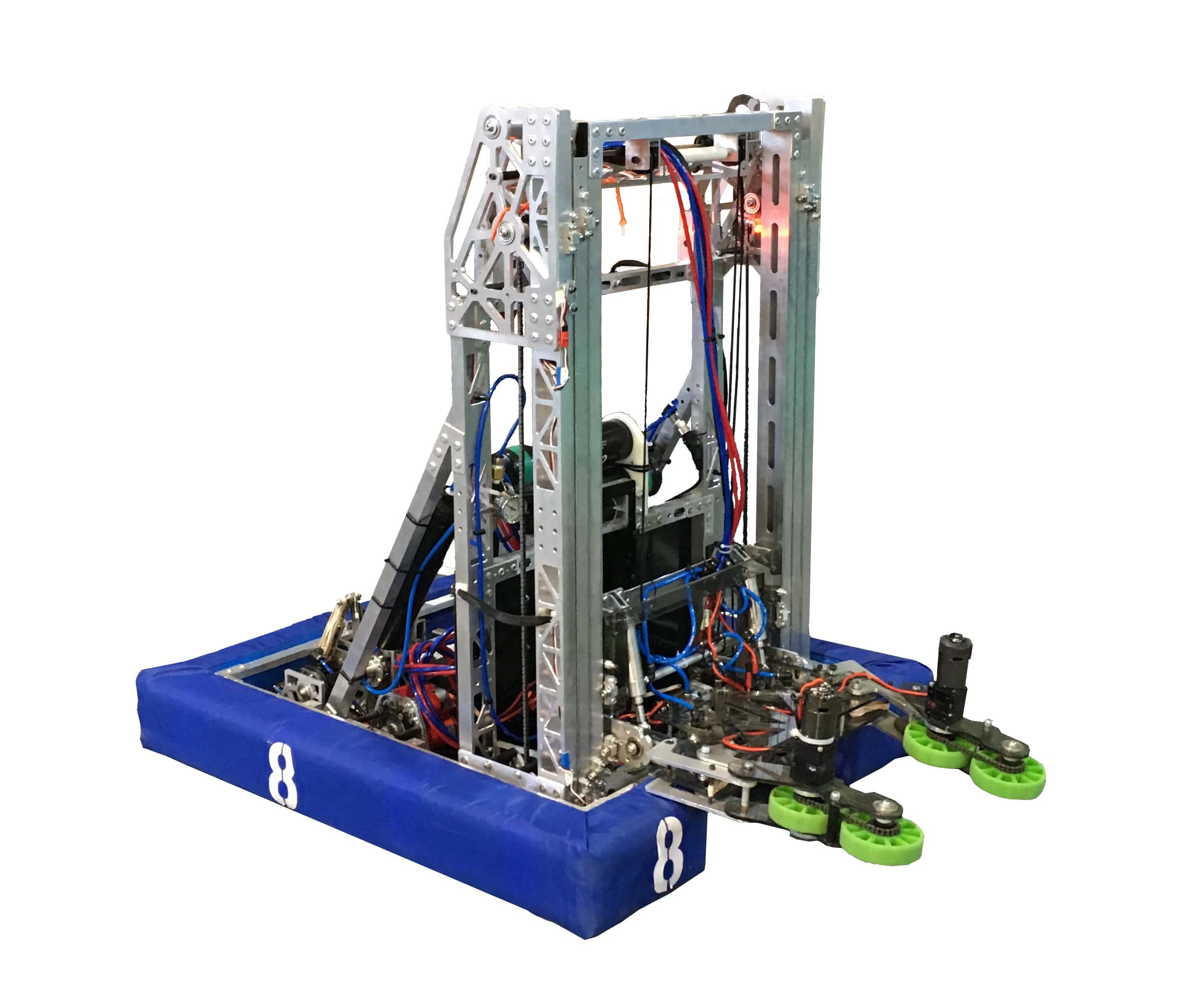
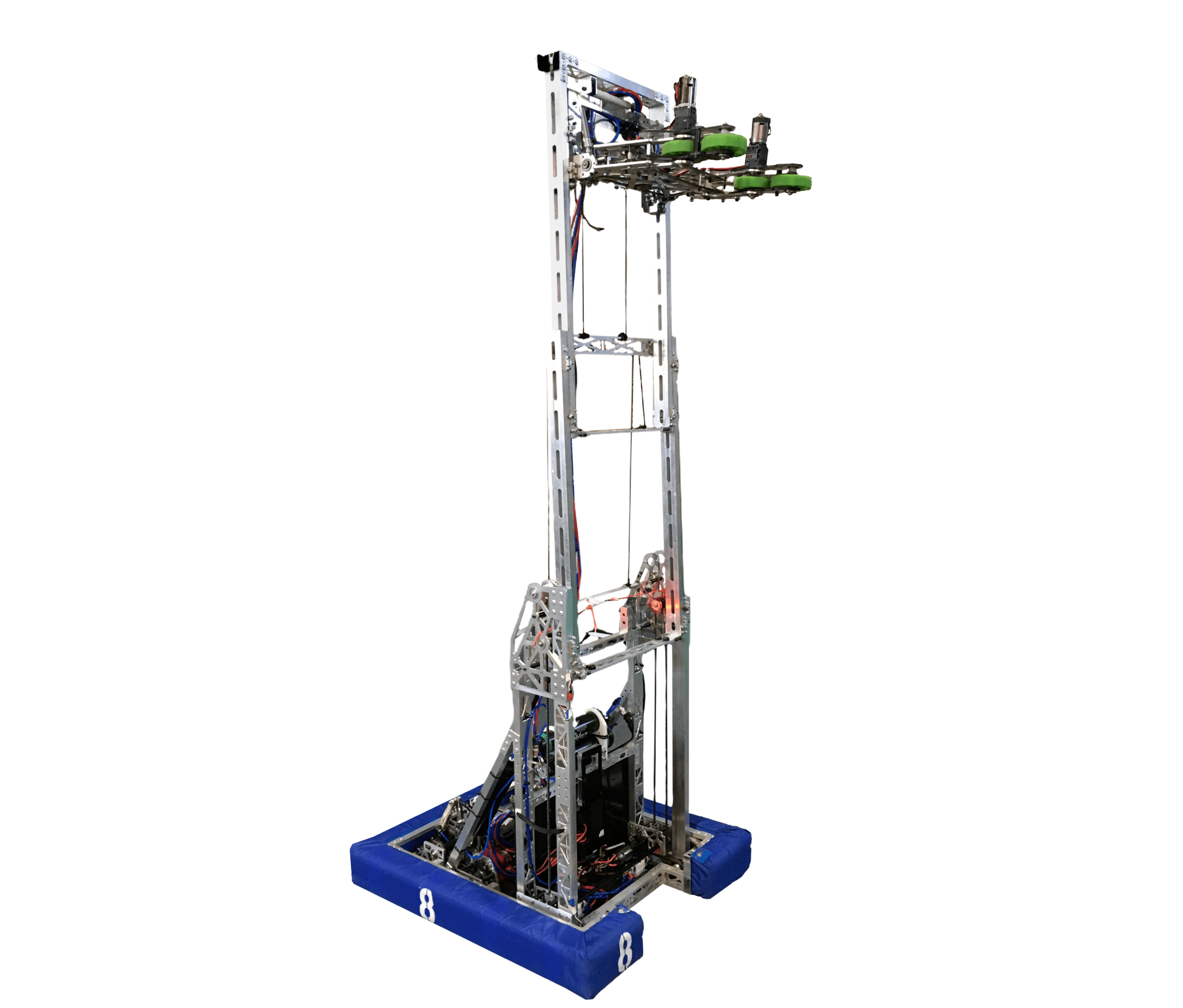
Robot Abilities
Four SDS Mk4i swerve modules powered by Kraken X60s with 16t drive pinion adapter for a theoretical top speed of 18.9 ft/sec
Full width under-the-bumper intake for impact-resistance and contesting center line game pieces in autonomous
Dual-gearbox pivot powered by Kraken X60s at a 113.7:1 overall reduction adjusts the shooter angle and allows shooting from anywhere on the field
8x 4” Colson wheels and 6x 4” Stealth kicker wheels powered by two Kraken X60s consistently shoot game pieces with power and spin
Motor-actuated bar rebounds game pieces into the Amp after shooting for consistency
Two single-stage telescoping enable sub-5 second climbing; capable of climbing to the side of the chain for harmonizing
Custom Kalman Filter determines precise robot pose, fusing estimates from multiple AprilTag cameras to account for poor field tolerances
An interpolating tree map uses pose estimates to determine the correct shooter angle and aim
Shoots on the move by iteratively solving for the robot's future position using vision pose estimates and an interpolating tree map of game piece flight times
Eir
Specifications
Name Eir
Game Charged Up
Weight 115.0 lbs
Competition History
Utah Regional Semifinalists, Sustainability Award, Dean's List
Idaho Regional Semifinalists
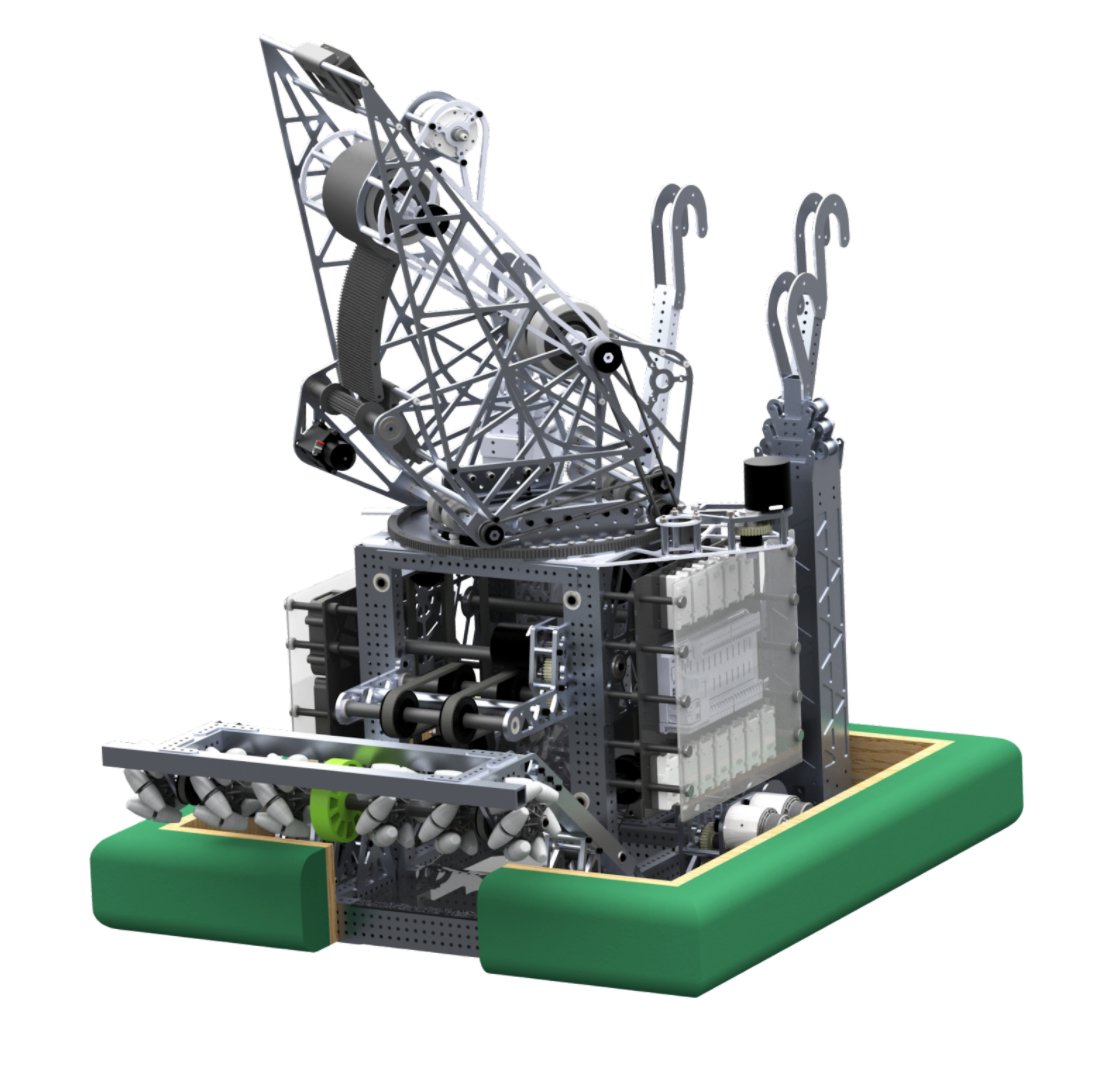
Robot Abilities
Four SDS MK4i swerve modules powered by Falcon 500s with a theoretical top speed of 16.3 ft/sec; 26.5" x 26.5" frame perimeter
Two-roller intake on a chain and sprocket pivot for grabbing cones and cubes from ground and substation in any orientation
Double-jointed arm with pneumatic cylinder actuated bottom pivot and motor driven top pivot powered by 2x NEOs at a 182.25:1 overall reduction
Uses two Limelight 3s to align to the vision tape by combining the yaw measurements of each Limelight for extra accuracy
Accounts for the force of gravity as arm moves by recalculating the center of mass based on the rotation of the intake while using procedurally generated trajectories to move both arm joints
LED animations indicate whether going to position for intaking/scoring cones vs. cubes as well as communicate with the human player what game piece to put in
Alvaldi
Specifications
Name Alvaldi
Game Rapid React
Weight 117.0 lbs
Competition History
Ventura County Regional Semifinalists, Innovation in Control Award
Monterey Bay Regional Quarterfinalists
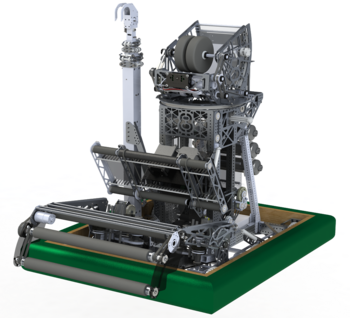
Robot Abilities
6x 4 in. Andymark Hi-grip wheel west coast drive powered by 4x Falcon 500s. Theoretical top speed of 15.91 ft/sec
Motor actuated intake with 4 in. mecanum wheels to vector cargo and a secondary set of 2 in. compliant wheels
L-shaped indexer that can store 2 cargo and can transition cargo to the shooter or expel it through the intake.
2, 4 in. colson wheels with continuous hood which allows the robot to shoot anywhere on the field.
180 degree turret powered by a NEO motor to reduce cycle times.
2 sets of climber arms with passive hooks. 1 pair of 3-stage active active telescoping arms and 1 par of swinger arms actuated by a gas shock. Capable of reaching the traversal rung.
Limelight provides the distance to the hub, allowing our shooter and turret to determine an appropriate target flywheel velocity, hood angle, and turret angle to accurately score cargo into the upper hub.
Nari
Specifications
Name Nari
Game Infinite Recharge
Weight 123.3 lbs
Competition History
Utah Regional Winners, Quality Award
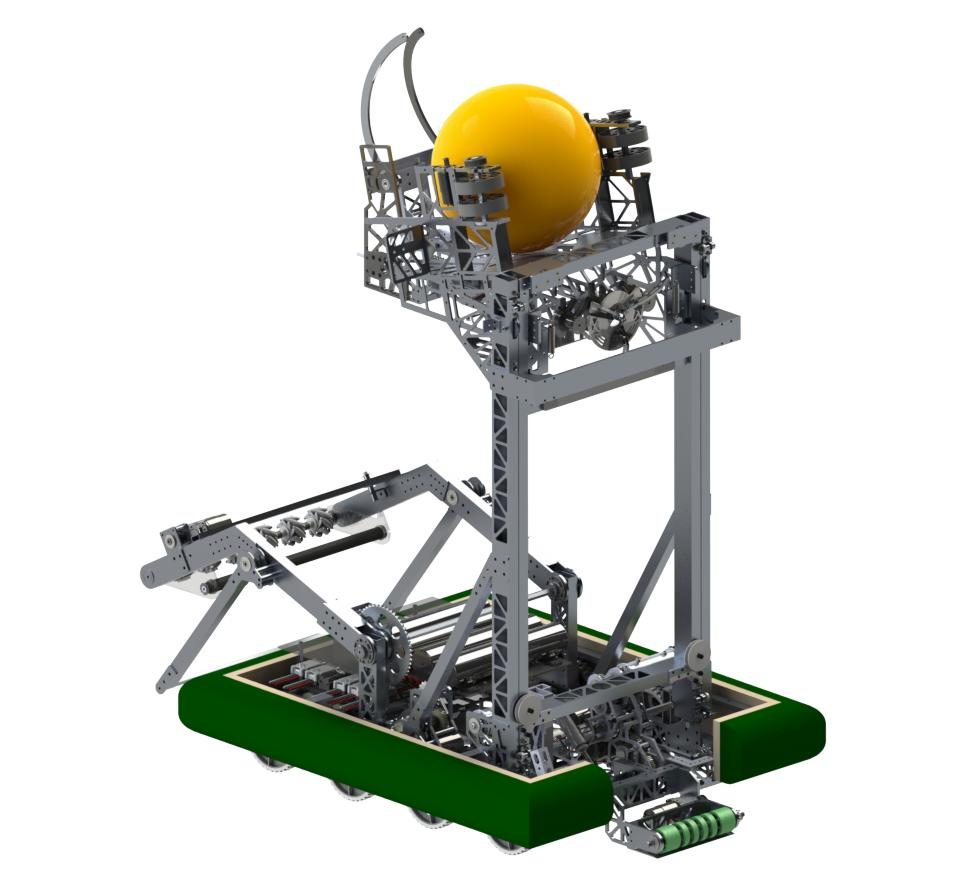
Robot Abilities
6x Andymark Hi-grip wheel west coast drive powered by 4x Falcon 500s. Theoretical top speed of 13.5 ft/sec
5 ball linear indexer with “V” configured belts for internal ball singulating
Virtual 4-bar intake utilizes stationary sprocket and chain system to fold inwards when stowed or impacted
Uses a pneumatically adjusted hood with 3 positions and 2x NEO motors to consistently shoot power cells from anywhere between the front of the control panel and the target zone
Telescoping climber enables sub 5 sec. climb when the switch is tipped or stationary
Limelight provides the distance to the target, enabling our shooter to determine an appropriate target flywheel velocity
LED animations enable better driver and operator synchronization used to indicate bot alignment, climber lock, power cell pickup, ball launches and more.
Víðarr (VIH-dar)
Specifications
Name Víðarr
Game Deep Space
Weight 123.7 lbs
Competition History
Del Mar Regional Semifinalists, Entrepreneurship Award, Dean's List
Great Northern Regional Quarterfinalists, Autonomus Award
Silicon Valley Regional Semifinalists, Gracious Professionalism
Robot Abilities
8 traction wheel west coast drive powered by 6x NEOs. Theoretical speed of 19.5 ft/sec.
2 stage continuous elevator with Dyneema rigging. Can score hatches and cargo on all three levels of cargo and rocket ship.
Touch-it-own-it cargo intake with 2″ mecanums powered by one 775pro.
Uses rack and pinion mounted under carriage to extend hatch intake mechanism and push cargo into flywheels.
Vision target tracking to adjust robot turning when aligning to loading station and cargo/rocket ship bays.
Forseti
Specifications
Name Forseti
Game Power Up
Size 32″ W x 27″ L x 42.6/99.5″ H
Weight ~114 lbs
Competition History
Arizona North Regional Quarterfinalists, Entrepreneurship Award
Silicon Valley Regional Semifinalists
Robot Abilities
8 wheel west coast drive powered by 8x 775Pro. Max speed of 16 ft/sec
3 stage cascading elevator with paracord rigging. Can score cubes in the scale even when tipped in favor of the opposing alliance
4” Andymark compliant wheels on 4 bar setup for versatile intake of Power Cubes in multiple configurations
2 cube switch autonomous, single cube scale autonomous
Vali
Specifications
Name Vali
Game Steamworks
Size 34″ W x 25″ L x 24″ H
Weight 92.9 lbs
Competition History
Ventura Regional Quarterfinalists, Creativity Award, Entrepreneurship Award
Silicon Valley Regional Finalists, Entrepreneurship Award
Roebling Division Semifinalists
Robot Abilities
Max 6 gears per match
10 second climb with velcro winch on elastic velcro rope
Horizontal slider for peg and feeder station alignment
Octogonal bumpers on 8 wheel west coast drive
Center and Side Peg autonomous
Tyr
Specifications
Name Tyr
Game Stronghold
Size 27″ W x 32″ L x 18″ H
Weight 92.4 lbs
Competition History
Central Valley Regional Finalists
Silicon Valley Regional Quarterfinalists
Curie Division
Robot Abilities
Capable of breaching low bar, rough terrain, moat, rock wall, cheval de frise, and ramparts
Can score 3 high goals per match with spring loaded pneumatic puncher